The es:scope® platform is designed for testing, measuring, and adjusting the runtime variable behavior of embedded systems. It incorporates the functionality of oscilloscopes, data acquisition devices, and calibrators.
This guide explains how to use es:scope® with es:prot™.
- Oscilloscope: Visualize and analyze signals
- Data Acquisition System (DAQ): Record and export signals
- Calibrator: Set paramters and send commands
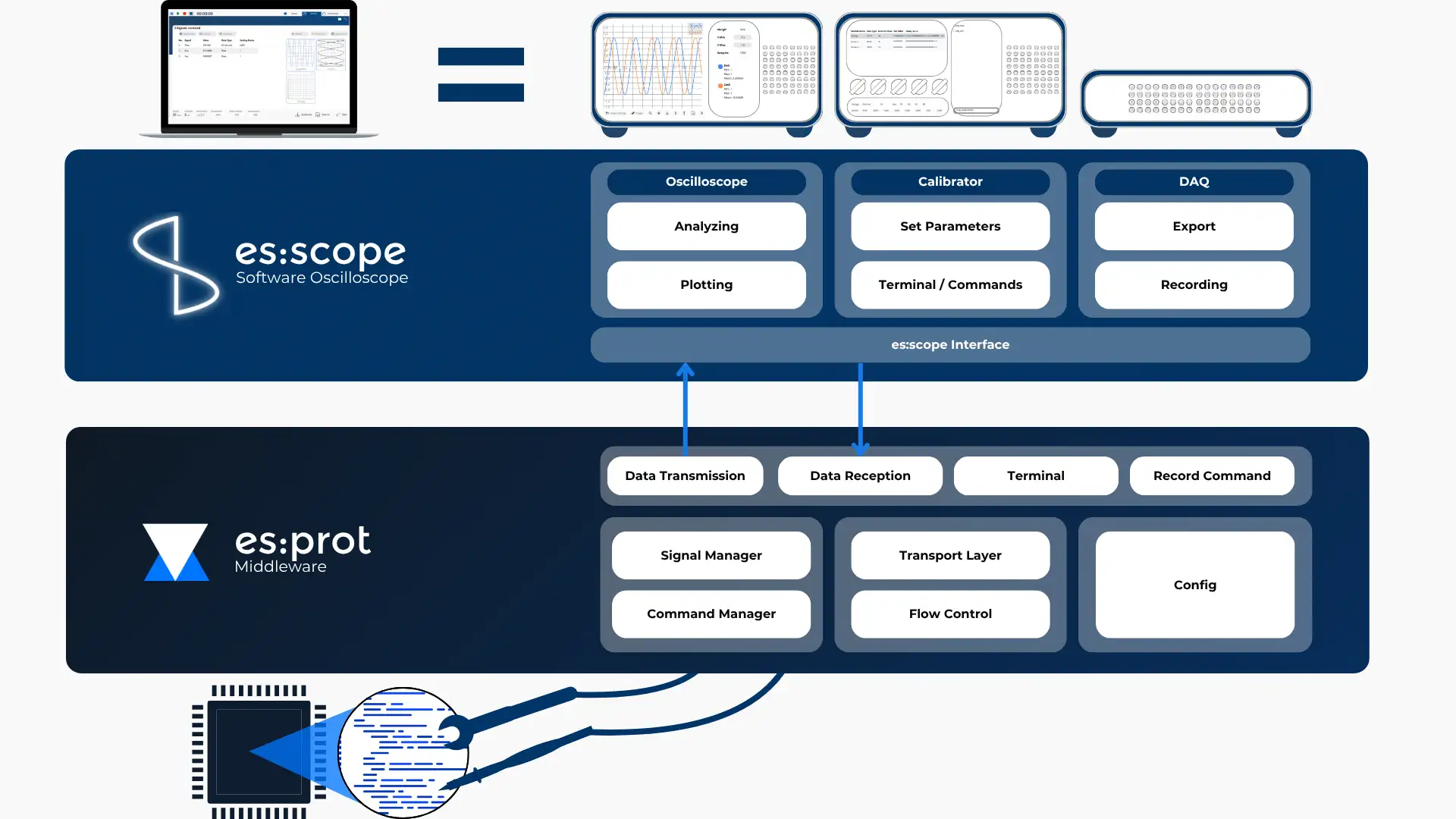
¶ Software Oscilloscope: Visualize and Analyze
es:scope is inspired by oscillsocopes in its design and feature set. Plot windows are used to visualize and analyze real-time signals. Thanks to hardware acceleration these can plot high data rates.
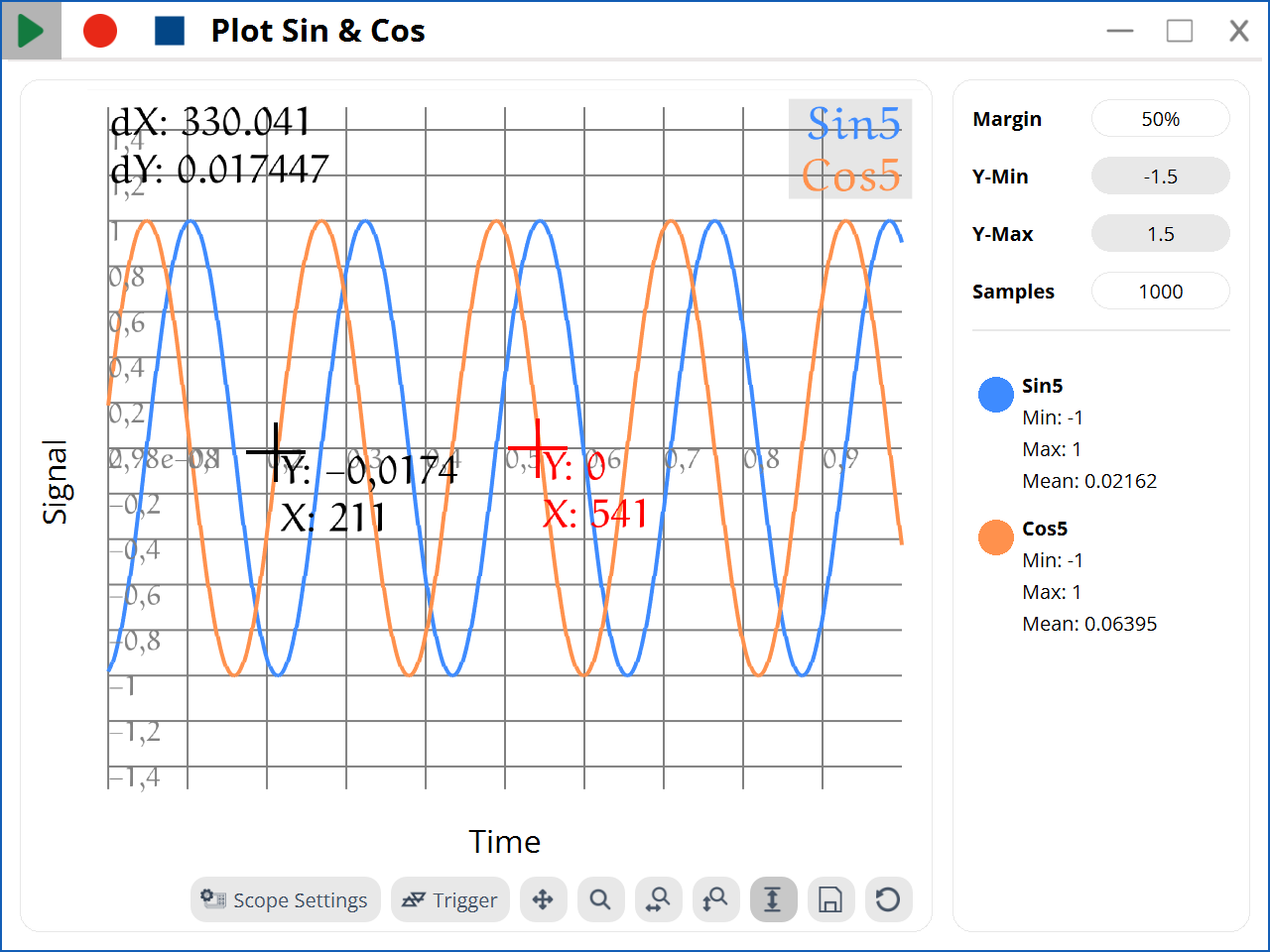
¶ Measure signals:
- Activate a crosshair: While pressing the CTRL key.
- Create tooltips: Double-click with the left and right mouse button.
- Remove tooltips: Double-click a tooltip.
¶ Change signal representation:
- Add transparency to a signal: Hover it in the legend and use the mouse wheel.
- Switch line display type: Click on the respective signal in the legend to switch between showing points, interpolated lines, both, or nothing
¶ Change the view:
- Set the number of samples in the plot: Type a number in the Samples field
- Auto scale the window: Click on the magnifying glass buttons to auto scale the plot window
- Remove the control elements: Press CTRL + D on your keyboard.
- Rename an axis: Click on the x-axis and y-axis text.
¶ Take a Screenshot of the Current Plot
- Click the disk icon 💾 to export a screenshot of the current plot
¶ Trigger a signal
- Trigger a signal: Click the trigger button
- Adjust the trigger source, level, and position (in % of the x-axis).
- Choose an edge to detect. Selecting no edge disables the trigger.
- Click Accept.
Warning: If the number of samples plotted is close to the number of samples buffered, using a trigger may lead to partially drawn plots! If you experience this, increase the number of samples buffered.
¶ Data Acquisition (DAQ) Functions: Record and export
¶ Manual recording: controlled by es:scope
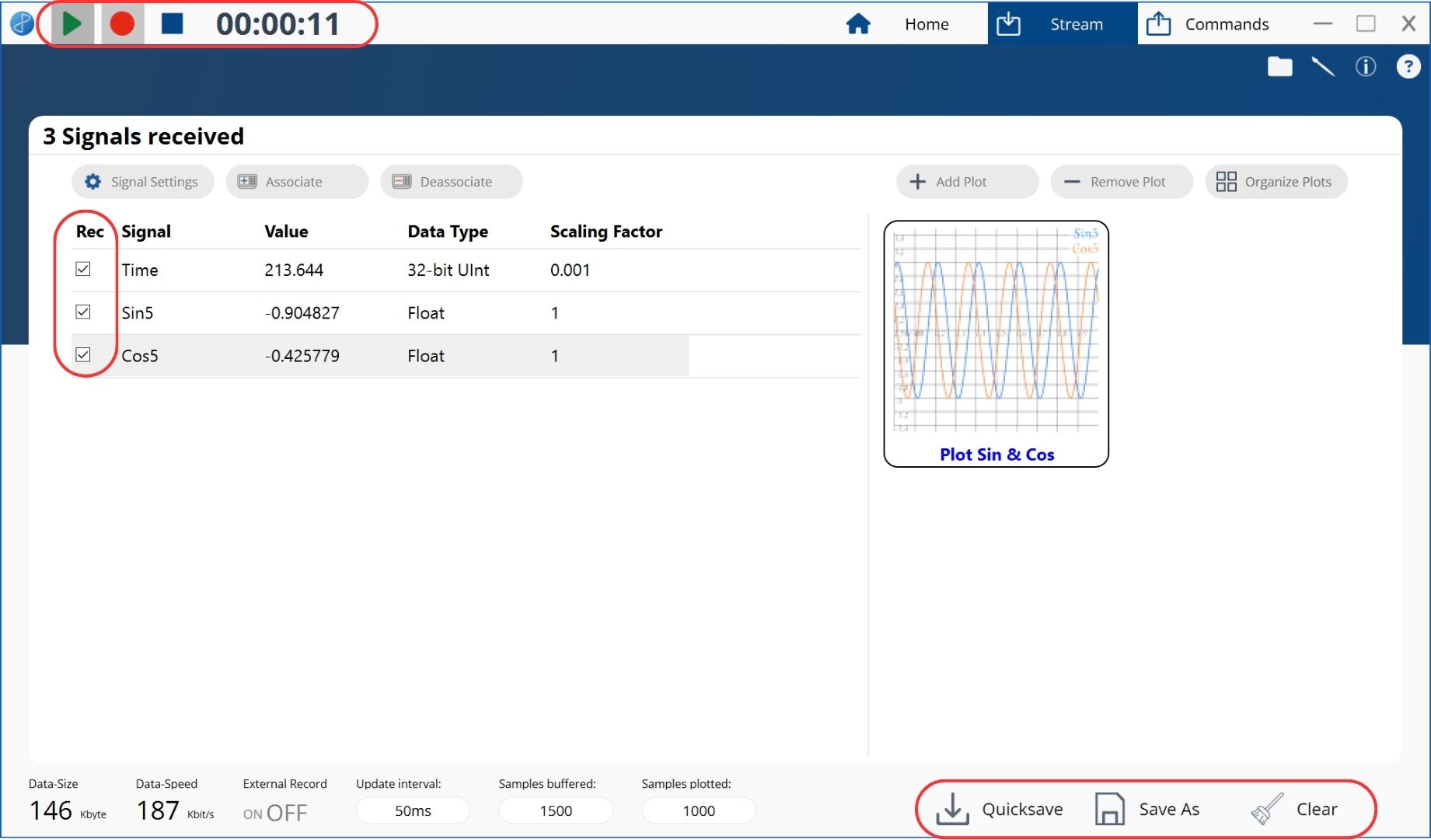
- Choose the signals to record: Check the Rec box in the signals table in the Stream tab.
- Start recording: Click the Record button in the top left corner of any window.
- Stop recording: Click Record or Stop.
- Export recording: Click Save as or Quicksave to save the recording as .csv or .mat.
- Clear the recording: Click the Clear button to clear the recording.
Indicators
- The timer on the top left shows the recording time.
- Data-Size shows the size of the currently recorded data in your RAM.
The size of the exported data file may be larger for reasons of compatibility (e.g. conversion to type double for .mat files).
¶ External record: controlled by es:prot
While in this mode, es:scope’s recording can be controlled using your embedded system with es:prot.
You cannot start or stop recording signals without disabling External Record in es:scope first.
It is recommended to configure the export settings first in es:scope
es:prot utility functions
- Start the recording:
es_prot_set_cmd(volatile es_prot *cp, ‘RECORD_CMD’) - Stop and export the recording:
es_prot_set_cmd(volatile es_prot *cp, ‘NO_CMD’)
// Activate recording of anomaly in q current
if (current_iq > 20) {
recording_active = true;
es_prot_set_cmd(&USB_COMM,RECORD_CMD);
}
// Deactivate recording
if (recording_active && current_iq < 19) {
es_prot_set_cmd(&USB_COMM,NO_CMD);
}
Configure the export settings
- Click the Export Settings button in the top right corner.
- Adjust the file type, naming schema, base name, and directory for saving files.
- Click Accept.
- Turn on External Record on the bottom of the main window.
Tip: If the naming schema Numeric counter is used, the counter will stop at 999. At this point, you have the choice to reset the counter and overwrite previous files or disable External Record. If many files are to be saved over a long period of time, it is recommended to use the naming schema ‘Date and time’ instead.
Tip: The applied export settings will also be used if you click Quicksave.
¶ Calibrator: Sending Data
es:scope has two ways of sending data to your embedded system: A calibrator and and a terminal.
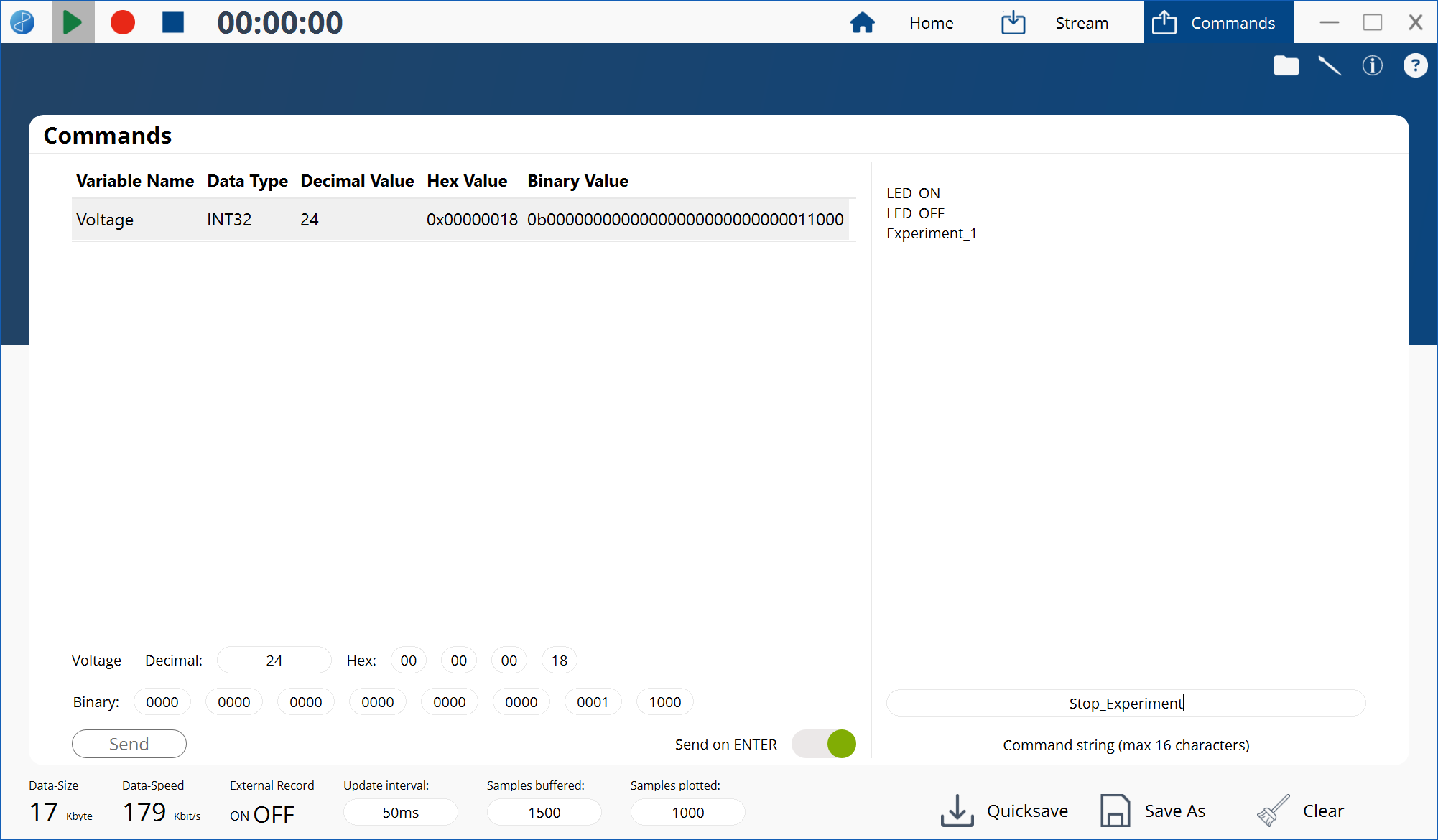
¶ Calibrator: Setting parameters
With the calibrator on the left side of the commands tab you can set the value of numerical parameters which were set up on our embedded system. These are pre-configured on the embedded device using es_prot_set_tx_data_info(). This is shown in the setup.
Once you send the new variable value from es:scope, it is send to es:prot's buffer with the exchange elicited by es_prot_manager. The value from the buffer can then be used in your code for calibrations and parameter resetting.
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
// Receive new values in regular intervals
if (htim == &htim4)
{
es_prot_manager(&USB_COMM);
p_parameter = es_prot_get_rx_value(&USB_COMM, 0);
}
}
¶ Terminal: Sending commands
With the terminal on the left side of the commands tab you can send a command string to the embedded system which can be accessed by means of the char array terminal_cmd in the es_prot struct. The buffer has a size of char[16];
char cmd[16];
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
// Receive new values in regular intervals
if (htim == &htim4)
{
es_prot_manager(&USB_COMM);
memcpy(cmd, es_prot.terminal_cmd, 16); // Copy the buffer es_prot.terminal_cmd
}
}